所属部署 研究第三部 産業グループ
氏名:青木良太
GoAとはUITP(国際公共交通連合)による鉄道の自動運転レベルを定める基準です。近年は自動車の自動運転が話題となっていますが、鉄道の自動運転は実用化されてから歴史が長く、無人で運行する鉄道は既に身近なものとなっています。これまで運転士が列車の運転を行い、車掌が周囲の安全確認やドア開閉などを行ってきました。自動運転により、発進操作以外の速度調整、ブレーキ操作が自動になることで運転業務負荷が低減し、運転士が車掌業務を兼務するワンマン運転が可能となります。またヒューマンエラー低減による安全性の確保、定時運行、運送効率の向上および省エネなどに貢献しています。一部の先進国では人口減少に伴う要員確保の問題が予想されるため、自動化・無人化は将来の鉄道事業を維持するための一つの解決策として注目されています。
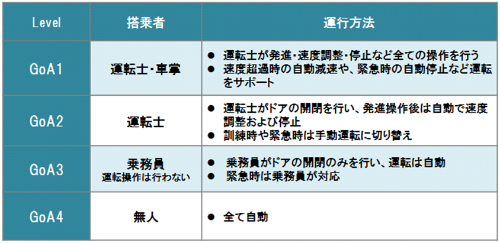
GoAのレベルは4段階に定められています。GoA 1は初期段階であり、運転士が基本的な操作を行い、自動運転システムは速度超過時の減速や緊急ブレーキなどの支援をします。GoA 2は速度調整およびブレーキ操作を自動で行います。運転士は乗務しますが、ドアの開閉、発進操作のみを行います。運転に関する業務負荷を低減し、車掌業務を兼務することでワンマン運転が可能となります。また、緊急時や運転技術維持のための訓練時は手動操作に切り替え、運転士がマニュアルで運転することもできます。GoA 3は発進・停止は自動で行われ、安全確認とドアの開閉のみを行う乗務員のみが搭乗します。原則として乗務員は運転に関わる操作は行いません。GoA 4は完全な無人運転で、全て自動で行われます。列車の運行状況は中央指令室で監視し、必要に応じてオペレーターが遠隔で指示を出します。
現状GoA 4(無人運転)を達成している路線は世界でもまだ少なく、線路内への侵入のリスクが無い高架鉄道や地下鉄に限られています。転落を防止するためのホームドアの設置、列車の制動性を高めるためのゴムタイヤ装着など、あらかじめGoA 4を前提とした新設路線の設備が必要となることが理由です。
地上走行を前提とした在来線の無人化は進んでいません。地上では人、車、動物およびその他物体の線路内侵入のリスクを無くすことはできないため、線路上の安全確認は運転士の重要な役割です。無人化のためには運転士に代わり、カメラやセンサーで前方の安全を確認することになりますが、一般的に約600メートルとされる列車の制動距離において、自動運転システムが運転士の目視と同等の安全確保をすることは大きな技術課題となっています。また現状では運転士が線路脇に設置された信号機を確認し減速・停止などの操作を行っていますが、無人運行では運行状況を通信で把握し、自動で制御する必要があります。広域な路線ネットワークを持つ在来線において、無人運転のためのインフラ更新はコスト面でも大きな課題です。また、これまで有人運転していた路線が無人化することは、乗客の心理的な不安が残るかもしれません。そのような中で、長きにわたり鉄道の技術開発に携わっている欧州および日本を中心に在来線無人化の取り組みが進められています。ここでは身近である日本、統一規格の開発を進める欧州および世界で始めての無人貨物鉄道の実現をめざすオーストラリア鉱山鉄道の動向について紹介します。
●日本
無人運転専用路線では多くの実績を持っていますが、将来に向けて在来線無人化の取り組みが進められています。東日本旅客鉄道(JR東日本)では広域かつ高頻度で運行する首都圏の運行オペレーションを最適化するため、20年後には自動無人運転を在来線で実現する目標を設定しています。異なる路線間の相互乗り入れによる多方面直通運転、災害時の迂回(うかい)など、シームレスかつフレキシブルな運行を自動運転システムで実現するためには、単一路線の運行を個別指令するのではなく、エリア内の複数路線を包括した指令により運行を最適化する必要があります。
●欧州
欧州ではEUおよび各国鉄道会社と車両メーカーによる官民パートナーシッププログラムShift2Railで、EUが進める列車制御システムの欧州統一規格であるETCS(欧州列車制御システム)をベースとした無人運転の実現を目標に掲げています。Shift2RailではETCSベースのGoA 2(自動運転)を2019年に実現し、GoA 3およびGoA 4(無人運転)を2024年に実現する目標を掲げています。ドイツ鉄道(Deutsche Bahn)は将来のGoA 4実現に向け、一部路線にて無人運転の試験走行に加え、機関車路線入れ換え業務の無人化も進めています。
●オーストラリア鉱山鉄道
鉱山会社RioTintoは所有する鉱山鉄道において、世界で始めて在来線の無人運転実現の取り組みを進めています。これは内陸部の鉱山で採掘した鉄鉱石を輸出する港まで運ぶ専用の鉄道であり、RioTintoの鉄道網は合計1,700 kmに及びます。最も長い路線はHope Downs 4採掘所とDampier港を結ぶ約500 kmであり、列車の往復に40時間以上かかります。この間、何度も運転士が交代し、その都度大きな発進・停止ロスが発生するため、運営上の課題となってきました。RioTintoが進めるAutoHaul® プロジェクトは鉱山鉄道の完全無人運転をめざすもので、現在は最終試験走行に取り組んでいます。在来線無人運転の実用化は貨物鉄道が先行し、実績を積み重ねて旅客鉄道へ展開することになるかもしれません。
鉄道は大量輸送が可能で、エネルギー効率に優れた輸送手段です。一方で、鉄道は幹線輸送を担うことが多く、最終的な目的地にたどり着くにはその他交通サービスを利用しなければなりません。乗り継ぎ時間が長いため不便を感じることもあります。このような末端交通をラストワンマイル(ラストマイル)と呼び、連携の欠如が鉄道利用拡大の妨げの一つとなっています。この解決策として自動車との連携があります。自動車の完全自動運転は2025年をめどに実現される見込みですので、鉄道と自動車の両方の自動化を連携させることができればシームレスな乗り継ぎが可能となり、交通機関全体を最適化することができます。数十年後には乗り物は全てGoA 3以上となり、コントロールセンターからの遠隔操作になることも予想されます。自動運転のための車載センサーや走行制御ソフトウエア開発が進められていますが、交通全体最適化のための管制システムの開発や、車両制御と運行・交通制御の連携を自律的に行うためのAIやエッジコンピューティングの活用も重要な技術開発分野になってくるでしょう。
機関誌「日立総研」、経済予測などの定期刊行物をはじめ、研究活動に基づくレポート、インタビュー、コラムなどの最新情報をお届けします。
お問い合わせフォームでは、ご質問・ご相談など24時間受け付けております。
